#include "animaMatrixLogExp.h"
#include <iostream>
#include <vnl/algo/vnl_determinant.h>
#include <vnl/algo/vnl_real_eigensystem.h>
#include <vnl/algo/vnl_matrix_inverse.h>
#include <vnl/vnl_inverse.h>
#include <itkPoolMultiThreader.h>
Go to the source code of this file.
|
| template<class T > |
| void | anima::Get3DRotationExponential (const std::vector< T > &angles, vnl_matrix< T > &outputRotation) |
| | Computation of a 3D rotation matrix exponential. Rodrigues' explicit formula. More...
|
| |
| template<class T > |
| void | anima::Get3DRotationLogarithm (const vnl_matrix< T > &rotationMatrix, std::vector< T > &outputAngles) |
| | Computation of a 3D rotation matrix logarithm. Rodrigues' explicit formula. More...
|
| |
| template<class T > |
| vnl_matrix< T > | anima::GetExponential (const vnl_matrix< T > &m, const int numApprox=1) |
| | Computation of the matrix exponential. Algo: classical scaling and squaring, as in Matlab. See Higham, SIAM Matr. Anal., 2004. More...
|
| |
| template<class T > |
| vnl_matrix< T > | anima::GetLogarithm (const vnl_matrix< T > &m, const double precision=0.00000000001, const int numApprox=1) |
| | Computation of the matrix logarithm. Algo: inverse scaling and squaring, variant proposed by Cheng et al., SIAM Matrix Anal., 2001. More...
|
| |
| template<class T > |
| vnl_matrix< T > | anima::GetPadeLogarithm (const vnl_matrix< T > &m, const int numApprox) |
| |
| template<class T > |
| vnl_matrix< T > | anima::GetSquareRoot (const vnl_matrix< T > &m, const double precision, vnl_matrix< T > &resultM) |
| | Gets the square root of matrix m. More...
|
| |
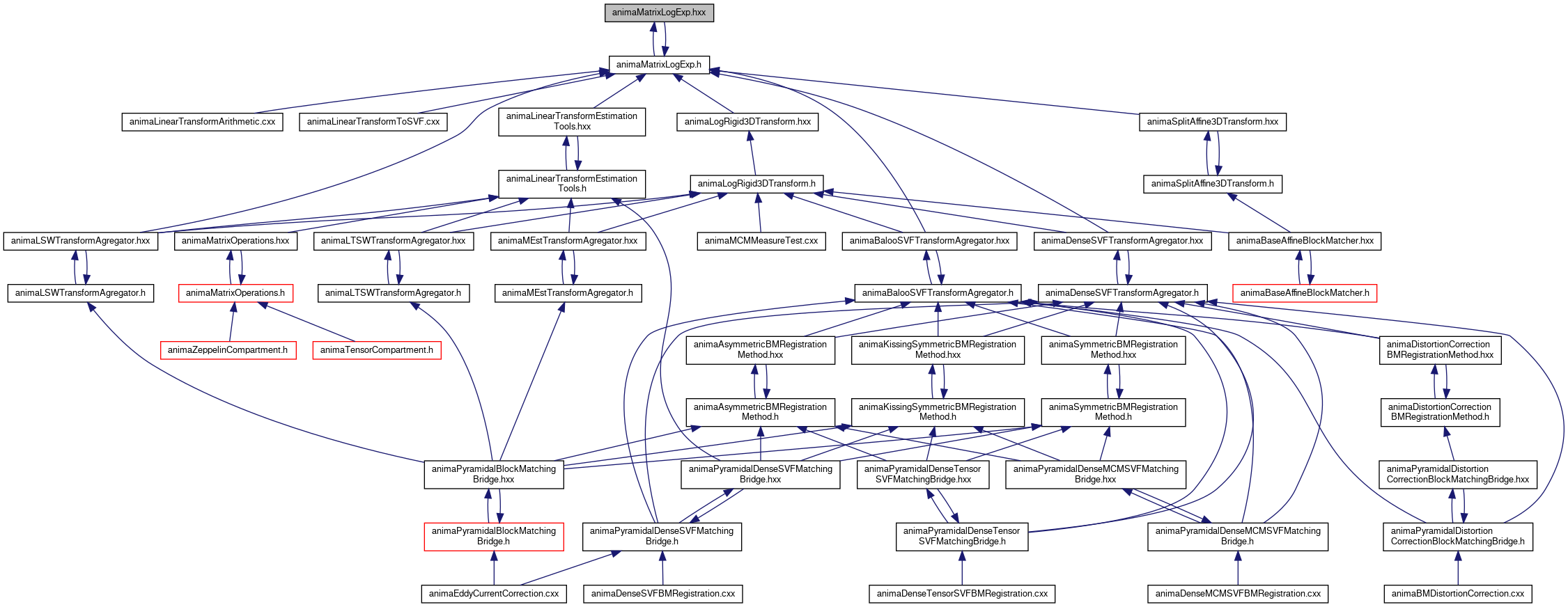
 Include dependency graph for animaMatrixLogExp.hxx:
Include dependency graph for animaMatrixLogExp.hxx: