|
| template<typename RealType , typename MatrixType > |
| void | anima::ExtractPPDRotationFromJacobianMatrix (vnl_matrix< RealType > &jacobianMatrix, vnl_matrix< RealType > &rotationMatrix, MatrixType &eigenVectors) |
| |
| template<typename RealType > |
| void | anima::ExtractRotationFromJacobianMatrix (vnl_matrix< RealType > &jacobianMatrix, vnl_matrix< RealType > &rotationMatrix, vnl_matrix< RealType > &tmpMat) |
| |
| template<class T1 , class T2 > |
| void | anima::GetTensorFromVectorRepresentation (const itk::VariableLengthVector< T1 > &vector, vnl_matrix< T2 > &tensor, unsigned int tensDim=0, bool scale=false) |
| |
| template<class T1 , class T2 > |
| void | anima::GetVectorRepresentation (const vnl_matrix< T1 > &tensor, itk::VariableLengthVector< T2 > &vector, unsigned int vecDim=0, bool scale=false) |
| |
| template<class T1 > |
| double | anima::ovlScore (vnl_diag_matrix< T1 > &eigsX, vnl_matrix< T1 > &eigVecsX, vnl_diag_matrix< T1 > &eigsY, vnl_matrix< T1 > &eigVecsY) |
| |
| template<class T > |
| void | anima::ProjectOnTensorSpace (const vnl_matrix< T > &matrix, vnl_matrix< T > &tensor) |
| |
| template<class T1 , class T2 > |
| void | anima::RecomposeTensor (vnl_diag_matrix< T1 > &eigs, vnl_matrix< T1 > &eigVecs, vnl_matrix< T2 > &resMatrix) |
| | Recompose tensor from values extracted using SymmetricEigenAnalysis (vnl_symmetric_eigensystem transposes all this) More...
|
| |
| template<class T1 , class T2 , class T3 > |
| void | anima::RotateSymmetricMatrix (T1 &tensor, T2 &rotationMatrix, T3 &rotated_tensor, unsigned int tensorDim) |
| | Rotates a symmetric matrix by performing R^T D R where R is a rotation matrix and D the symmetric matrix. More...
|
| |
| template<class T1 , class T2 > |
| void | anima::RotateSymmetricMatrix (vnl_matrix< T1 > &tensor, vnl_matrix< T2 > &rotationMatrix, vnl_matrix< T2 > &rotated_tensor) |
| |
| template<class T1 , class T2 , unsigned int NDim> |
| void | anima::RotateSymmetricMatrix (itk::Matrix< T1, NDim, NDim > &tensor, itk::Matrix< T2, NDim, NDim > &rotationMatrix, itk::Matrix< T2, NDim, NDim > &rotated_tensor) |
| |
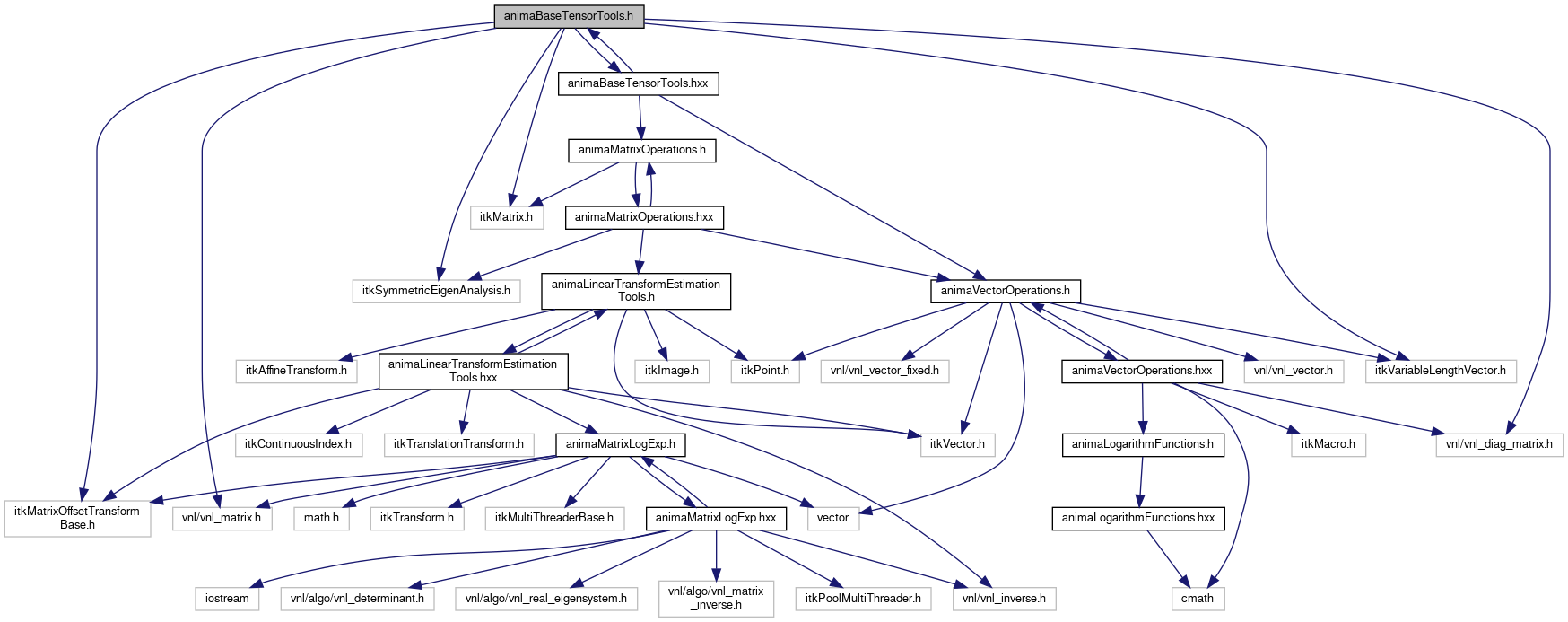
 Include dependency graph for animaBaseTensorTools.h:
Include dependency graph for animaBaseTensorTools.h: